極座標計算機
オンライン極座標計算機は、極座標とデカルト座標を相互に変換します。
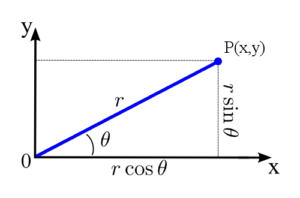
x = r·cosθ, y = r·sinθ
極座標系
極座標系は、平面上の各点が基準点からの距離と基準方向からの角度によって決定される 2 次元の座標系です。
基準点は極と呼ばれ、 極点からの基準方向の光線は極軸となります。極からの距離は半径座標、半径距離または単に半径と呼ばれ、角度は角度座標<と呼ばれます。 /i> 、極角または方位角。 極座標表記における角度は、通常、度またはラジアンで表されます。
数学では、基準方向は通常、極から水平に右に (X 軸に沿って) 向かう光線としてプロットされ、極角は反時計回りに増加します。逆方向に回転すると、極角は負の値に向かって減少します。 θ
一方、ご存知のとおり、平面上の直交座標またはデカルト座標は、それぞれ x 軸と y 軸に沿って測定された一対の数値です。 2 つの軸は互いに垂直です。平面上のすべての点は、この座標のペアによって決定できます。 xyP
極座標は、三角関数のサインとコサインを使用してデカルト座標に変換できます。
x=r⋅cosθ、 y=r⋅sin θ。
デカルト座標は、次の式を使用して、区間 (-,] および (-,] の ≥ 0) の極座標に変換できます。

まず ifis が上記のように計算され、次の式は逆コサイン関数を使用してより簡単に表すことができます: r θ

これらの公式は極座標計算機で使用されており、座標変換にかかる時間はわずか 1 秒です。